eBPF server 的实现#
整体构想#
我们的整体构想是,运用两种跟踪技术,即 gdbserver 和 eBPF server ,同时跟踪同一个目标(target),即虚拟机中运行的rCore-Tutorial-v3 操作系统。我们把会改变操作系统状态的那个跟踪技术(Qemu 的 gdbserver 或 OpenOCD )称为 main-stub,eBPF 的 gdbserver 称为 side-stub。Main-stub 具有可以改变操作系统运行状态的控制能力,而 side-stub 只负责收集信息,不影响内核的状态。下表详细展示了 main-stub 和 side-stub 功能与局限,可以看出,二者形成了很好的互补:
表3.1 eBPF Server 和 gdbserver 对比
基于eBPF的eBPF Server |
Qemu的gdbserver |
|
|---|---|---|
读内存,读寄存器 |
可以 |
可以 |
写内存,写寄存器 |
不可以 |
可以 |
获取 进程控制块等内核信息 |
方便 |
繁琐 |
停下(halt) |
不可以 |
可以 |
单步 |
不可 以(原因是不能停下) |
可以 |
watchpoint |
不可 以(原因是不能停下) |
可以 |
跟踪函数调用关系 |
优点 :查看函数调用的参数 |
优点:查看函数调用栈 |
断点 |
类 似tracepoint,触发后 被调试的操作系统不能 停下,主要起辅助作用 |
断点 触发后被调试的操作系 统会停下,这对于第二 章所述的一些静态分析 功能来说是必不可少的 |
跟踪异步函数 |
由于可以编写 帮助函数,因此较方便 |
较繁琐 |
利用 GDB 自带的远程调试功能和 Qemu 自带的 gdbstub 功能,我们很容易就能建立 main-stub 和 GDB 的连接。接下来要解决的问题就是如何让 GDB 在连接到 main-stub 的同时也连接到 side-stub,即我们编写的 eBPF server。
GDB 和 main-stub 用 TCP 协议通信,但是由于主线版本的 rCore-Tutorial-v3 暂未提供稳定的网络协议栈和网卡驱动支持(不论是真实网卡还是 Qemu 虚拟机的 virtio 虚拟设备)且 eBPF server 是运行在操作系统里的,因此若要让 eBPF server 用TCP协议连接到 GDB ,实现难度比较大。我们在调研了各种调试器与调试器服务器通信的方案后,选择用串口进行二者的通信。
基于串口的 GDB 与 eBPF server 的通信机制 ———————————————–s
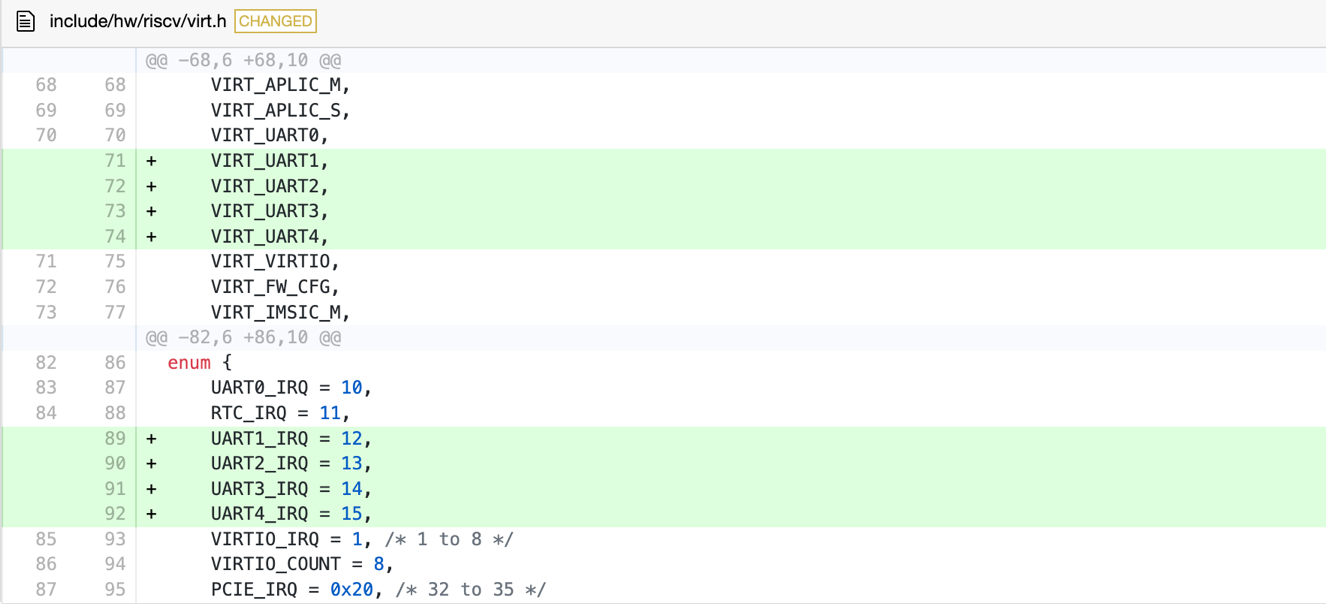
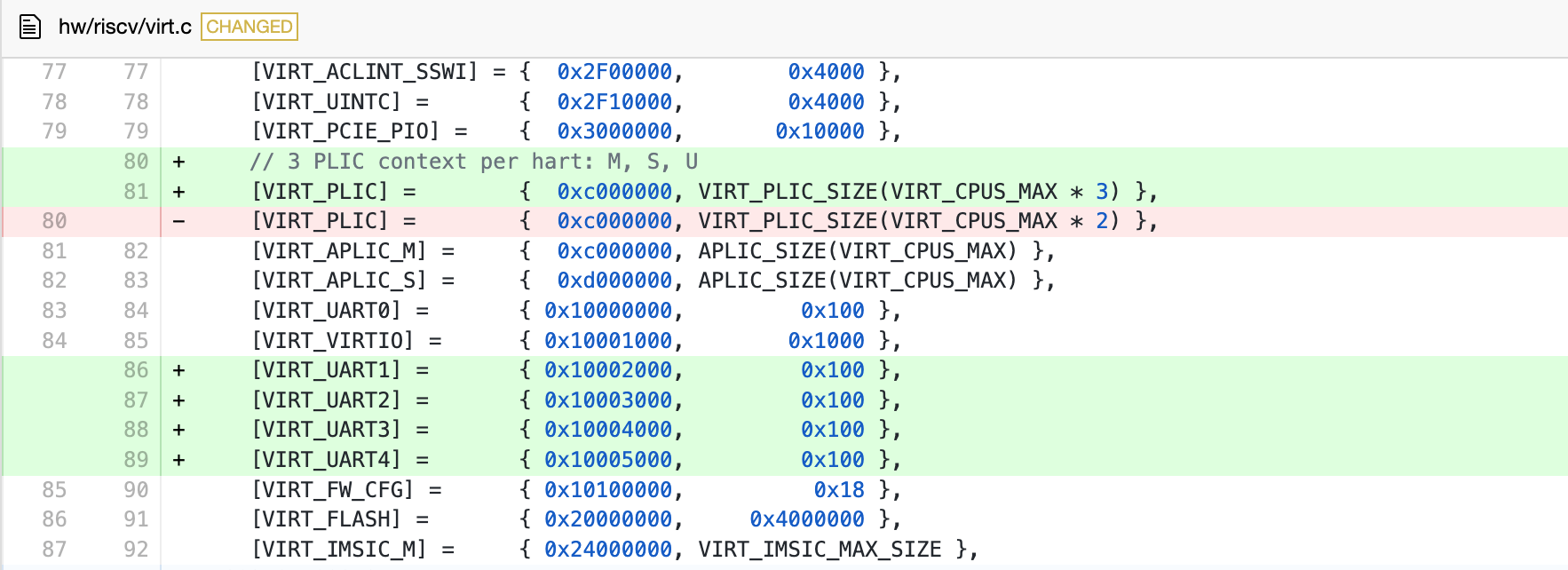
将由于 rCore-Tutorial-v3 的终端已经占用了一个串口用于文字输入输出,为了不影响操作系统的运行状态,eBPF Server 需要用另一个专属的串口来和 GDB 通信。关于给虚拟机添加更多串口,大部分网上的资料仅提到添加一个 Qemu 启动参数,但是经过实际测试后发现这不起作用。原因是Qemu 虚拟机并未支持 RISC-V 平台的多串口收发。因此,我们修改了 Qemu 虚拟机的源代码,为新串口分配了 MMIO 地址和 IRQ(中断号):
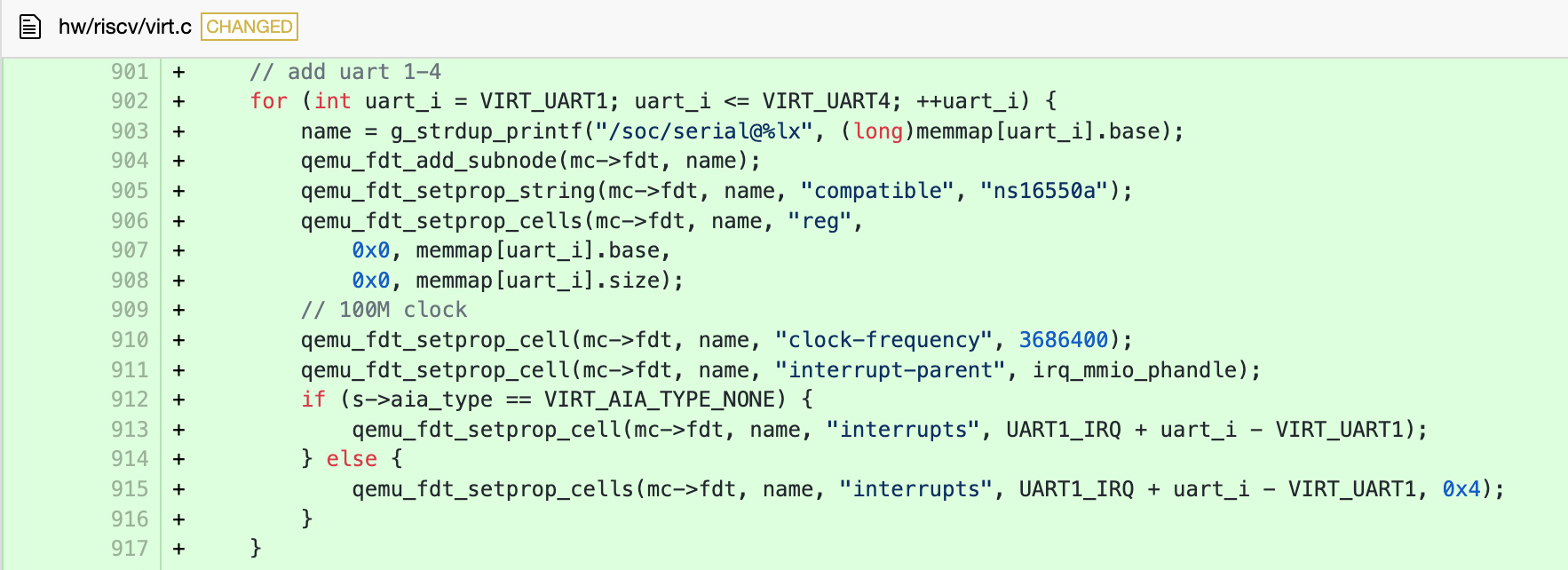
还修改了设备树初始化函数:
我们发现运行在修改后的 Qemu 中的 rCore-Tutorial-v3 操作系统可以给第二个串口发送消息,但不能接收基于中断机制的消息。这是因为在 RISC-V 中,存在用于保护物理地址的寄存器 pmpcfg 和 pmpaddr [6]。而 rCore-Tutorial-v3 的 SBI(rustsbi-qemu)通过设置这两个寄存器的值,使得只有 SBI 部分和 OS 所在的地址空间可以使用,而PLIC、串口等设备所在的物理地址不可以使用。为了调试方便,我们修改了SBI对 pmpcfg 和 pmpaddr 的设置,使得所有物理地址都可以被使用。
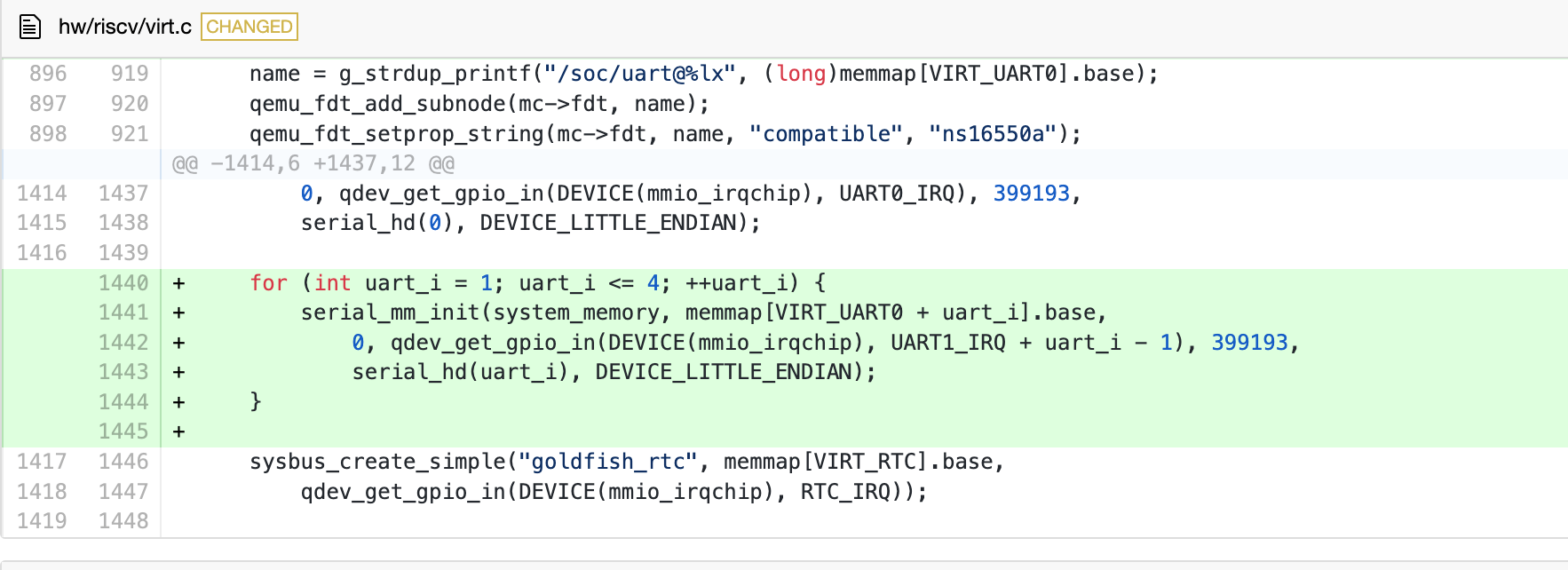
同时,为了支持第二个串口的通信,我们参考原有的串口相关的代码,对 rCore-Tutorial-v3 做了尽可能少的修改,修改内容包括:添加第二个串口的初始化例程、修改中断处理例程、添加用于在第二个串口收发单字节的系统调用和 eBPF 帮助函数(helper functions)。
至此,我们实现了基于中断的多串口数据收发,使得 GDB 与 eBPF server 可以通过串口通信。需要注意的是,eBPF 依赖的内核模块是不能通过 eBPF 本身来调试的。比如,eBPF Server 依赖内核的串口,如果我们试图让 eBPF server 跟踪这个串口的行为,那么 eBPF Server 收集的数据也会通过这个串口来发送,这又会触发 eBPF Server 的跟踪,进而陷入死循环。
在 GDB 和 eBPF Server 之间实现 RSP 协议#
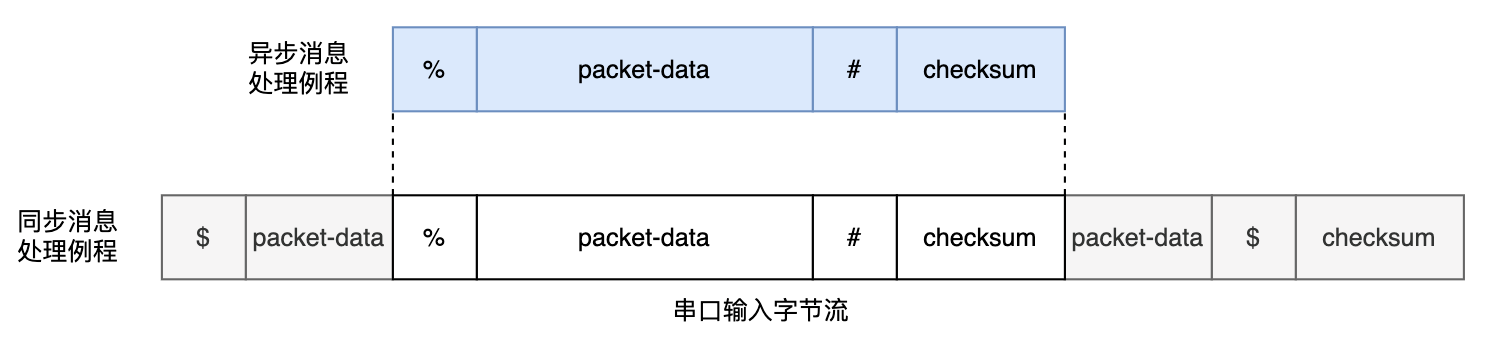
在串口或网络之上,GDB 和 main-stub 之间用 RSP 高层协议进行通信。RSP协议规定的基本消息单位是由ASCII字符组成的数据包(Packet),数据包的格式如下图所示:

其中,“$”用于标识数据包的开头,packet-data是传送的实际数据,checksum(即校验值)是“$”和“#”之间所有字符的模 256 和,它是八位无符号整数,编码成ASCII字符后一定占用两个字符,所以“checksum”这三个字符标示了一个数据包的结束。通信的双方在接收到数据包后,可以发送单个“+”字符表示数据包接收成功,或发送”-“表示数据包接收失败,要求重发。
除此之外,还有一种通知数据包(Notification Packet)。它和普通的数据包的区别有两个:1)普通数据包的交流机制是同步的,而通知数据包是异步的,常用于通知 GDB 某个事件的发生,2)收到通知数据包后无需像普通数据包一样发送“+”或“-”。通知数据包的格式如下图所示,可以看到,通知数据包以字符“%”标识开头,而其余的格式和普通的数据包是一致的:

这套协议比较简明,且能满足我们的需求,因此,我们在GDB中增加一个子模块,让这个子模块使用 RSP 协议和 side-stub 进行通信。考虑到这个子模块将会有一个持续从串口接收字节流的线程,且有很多字符串处理流程,我们选择用 python 语言来编写这个模块,因为用 python 语言创建和管理线程比较简单,且已经有功能强大的 pyserial 库能够便捷地处理串口消息的收发。
虽然 main-stub 和 side-stub 都使用 RSP 协议,但是在实际的通信上,main-stub 主要以同步的方式收发消息,这是因为Qemu 的 gdbserver 的调试机制是同步的:Qemu 的 gdbserver 一般是在断点被触发,被调试的操作系统停下之后,才开始收集信息的。相比之下,side-stub 的跟踪调试功能主要依赖内核插桩机制,在插桩触发之后 eBPF 程序收集数据,收集完毕后eBPF程序立即退出,操作系统继续运行。side-stub 不会,也不能为了和 GDB 通信而让操作系统停下(而且,操作系统的 eBPF 模块有 verifier 子模块专门用于确保这一点)。因此大部分的信息都会以异步的方式传送给GDB。这种异步的消息处理方式提供了更高的并发性和响应性。然而,异步的消息可能会与同步的消息重合,这就要求和 side-stub 通信的 GDB 子模块具有较好的鲁棒性,能恰当地处理同步信息的字节流被异步信息的字节流打断的情况。
如前文所述,RSP 协议规定,同步的消息以字符“#”开头,而异步的消息以字符“%”开头。利用这个特点,我们设计了一个消息处理流程,可以确保消息的有序处理(图3.7):GDB中负责和 side-stub 通信的子模块逐字节接收来自 side-stub 的消息,默认情况下按同步信息处理,如果发现接收到了字符“%”,则接下来接收到的字节都放入异步消息处理例程,直到接收到“#”符号和后续的两个校验值后,再返回原来的同步消息处理流程继续从串口接收同步信息。这样,就算同步消息被异步消息打断,同步消息和异步消息都能被完整地接收。
由于多个 eBPF 程序不会并发运行,因此异步消息流之间是按顺序发送的,不会互相重叠;运行 eBPF 程序时,操作系统其他部分是不运行的,操作系统中负责收发同步消息的用户态进程也不运行,直到 eBPF 程序发送完了异步消息后,这个用户态进程才会继续运行,继续同步消息的发送,这种机制可以确保异步消息不会被同步消息打断。
上述异步消息处理例程的代码如下:
def read_async_msg(self,starts_with):
msg=''
end_count = msg_max_len
# print("gonna loop")
while end_count > 0:
c = self.ser.read(1)
if c == b'\x00':
continue
c = str(c,'ascii')
# gdb.execute("echo "+c)
msg+=c
if c == '#':
end_count = 3
end_count -= 1
gdb.execute('echo '+starts_with+msg+"\n")
同步消息处理例程的代码如下:
def msg_reader(self):
while True:
input_stream = "" # a packet
end_count = msg_max_len
while (end_count > 0):
c = str(self.ser.read(1),encoding='ascii')
if c == '+':
pass
elif c == '%':
# print('Percentage Symbol')
self.read_async_msg(c)
continue
elif c == '#':
end_count = 3
input_stream+=c
else:
input_stream+=c
end_count-=1
self.ser.write('+'.encode('ascii'))
GDB 允许在不修改源代码的情况下支持 python 语言编写的扩展脚本,然而这个特性在我们使用的 Ubuntu20.04 的包管理器自带的GDB,和RISC-V工具链提供的 GDB 可执行文件中都是关闭的,因此我们需要自行编译一份支持 python 扩展的GDB。
在 GDB 中运行的 python 脚本可以使用 GDB 库,通过继承这个库中的 MICommand 类,我们将这个和side-stub通信的子模块封装成一个 GDB/MI 命令供 Debug Adapter 调用,这种封装也使得在在线 IDE 中适配 side-stub 变得容易(工作量相当于在已有代码的基础上支持一个新的 GDB 命令)。
在 Debug Adapter 中适配 eBPF Server#
至此,GDB可以同时连接到 gdbserver 和 eBPF Server. 在 GDB 的层面上,和 eBPF Server 的所有交互都是通过 side-stub 命令进行的。这个命令的规范如下:
// 连接到eBPF server的串口.
-side-stub target remote /dev/tty1
// 在某地址设置断点,然后收集寄存器信息
-side-stub break 0x8020xxxx then-get register-info
// 收集函数参数
-side-stub arguments <function-name>
接下来要在 Debug Adapter 中适配 eBPF Server。从 Debug Adapter 的角度来说,适配的工作主要分两部分,第一个部分是修改用于判断 GDB/MI 消息类别的正则表达式,使得 GDB 传来的 GDB/MI 消息能被正确地处理;第二个部分是,如果在线 IDE 请求执行一些和 eBPF Server 有关的行为,需要将这些行为翻译成对应的 GDB/MI 消息并发送给 GDB。目前,我们已经适配了前两个命令。
在在线 IDE 中适配 eBPF Server#
与 Debug Adapter 类似,在线 IDE 对 eBPF Server 的适配工作也分两部分:第一个部分是添加和 eBPF Server 有关的用户界面(包含 Debug UI 和 WebView)并将用户界面的相关事件绑定到 Debug Adapter Request 的发送函数上;第二个部分是将 Debug Adapter 传来的 Events 和 Responses 信息进行解析并将这些信息更新到对应的用户界面元素上。
需要注意的是,在用户的使用流程上,gdbserver 和 eBPF Server 的区别在于,eBPF server 要提前指定好插桩触发后应执行的行为。二者的使用流程具体如下:
gdbserver 的使用流程:
用户在在线 IDE 中设置断点。
断点触发,操作系统暂停运行。
GDB 等待 Debug Adapter 传来的用户的指令,并据此执行信息收集,控制操作系统等行为。
eBPF Server 的使用流程:
用户在在线 IDE 中设置断点并提前指定断点触发后的操作。
操作系统中的 eBPF 模块注册相关的 eBPF 程序。
断点触发,eBPF 程序执行这些操作,返回信息,操作系统继续运行。操作系统的状态和 eBPF 程序触发之前保持一致。